VPE-0.1 Small Protable 100kg Positioner
✧ ແນະນໍາ
ຕໍາແໜ່ງການເຊື່ອມໂລຫະຂະໜາດນ້ອຍ 100kg ເປັນເຄື່ອງເຊື່ອມແບບພົກພາແບບພົກພາ, ນໍ້າໜັກຕົວມັນເອງຍັງເບົາ, ດັ່ງນັ້ນພວກເຮົາສາມາດຍ້າຍມັນໄດ້ງ່າຍຕາມຄວາມຕ້ອງການຂອງການເຊື່ອມໂລຫະ. ແຮງດັນການເຊື່ອມໂລຫະຍັງສາມາດ 110V, 220V ແລະ 380V ແລະອື່ນໆ ແຮງດັນທີ່ກໍາຫນົດເອງ.
ຄວາມໄວການຫມຸນແມ່ນສາມາດປັບໄດ້ໂດຍລູກບິດ. ພະນັກງານສາມາດກໍານົດຄວາມໄວຫມຸນທີ່ເຫມາະສົມຕາມຄວາມຕ້ອງການຂອງການເຊື່ອມໂລຫະ.
ໃນລະຫວ່າງການເຊື່ອມໂລຫະດ້ວຍມື, ທິດທາງການຫມຸນສາມາດຄວບຄຸມໄດ້ໂດຍສະຫຼັບ pedal ຕີນ. ສະດວກກວ່າສໍາລັບພະນັກງານທີ່ຈະປ່ຽນທິດທາງຫມຸນ.
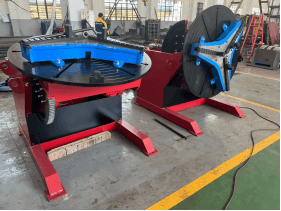
1.Standard 2 axis gear tilt welding Positioner is a basic solution for tilting and rotation of the work pieces.
2. ໂຕະເຮັດວຽກສາມາດຫມຸນໄດ້ (ໃນ 360 °) ຫຼື tilted (ໃນ 0 - 90 °) ອະນຸຍາດໃຫ້ຊິ້ນວຽກທີ່ຈະເຊື່ອມຢູ່ໃນຕໍາແຫນ່ງທີ່ດີທີ່ສຸດ, ແລະຄວາມໄວການຫມຸນ motorized ແມ່ນການຄວບຄຸມ VFD.
✧ ຂໍ້ມູນຈໍາເພາະ
| ຕົວແບບ | VPE-0.1 |
| ຄວາມສາມາດໃນການຫັນ | ສູງສຸດ 100kg |
| ເສັ້ນຜ່າສູນກາງຂອງຕາຕະລາງ | 400 ມມ |
| ມໍເຕີຫມຸນ | 0.18 kw |
| ຄວາມໄວຫມຸນ | 0.4-4 rpm |
| ມໍເຕີອຽງ | ຄູ່ມື |
| ຄວາມໄວການອຽງ | ຄູ່ມື |
| ມຸມອຽງ | 0 ~ 90 ອົງສາ |
| ສູງສຸດ. ໄລຍະຫ່າງທີ່ແປກປະຫຼາດ | 50 ມມ |
| ສູງສຸດ. ໄລຍະທາງກາວິທັດ | 50 ມມ |
| ແຮງດັນ | 380V ± 10% 50Hz 3Phase |
| ລະບົບການຄວບຄຸມ | ຣີໂມດຄວບຄຸມສາຍ 8m |
| ທາງເລືອກ | ການເຊື່ອມໂລຫະ chuck |
| ຕາຕະລາງແນວນອນ | |
| 3 ແກນຕໍາແຫນ່ງບົບໄຮໂດຼລິກ |
✧ ຍີ່ຫໍ້ອາໄຫຼ່
1.ຕົວປ່ຽນຄວາມຖີ່ແມ່ນມາຈາກຍີ່ຫໍ້ Damfoss.
2.Motor ແມ່ນມາຈາກຍີ່ຫໍ້ Invertek ຫຼື ABB.
3. ອົງປະກອບໄຟຟ້າແມ່ນຍີ່ຫໍ້ Schneider.
✧ ລະບົບຄວບຄຸມ
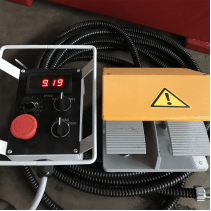
ກ່ອງຄວບຄຸມ 1.Hand ທີ່ມີການສະແດງຄວາມໄວການຫມຸນ, ການຫມຸນໄປຂ້າງຫນ້າ, ການຫມຸນ Reverse, Tilting Up, Tilting Down, ໄຟພະລັງງານແລະຫນ້າທີ່ຢຸດສຸກເສີນ.
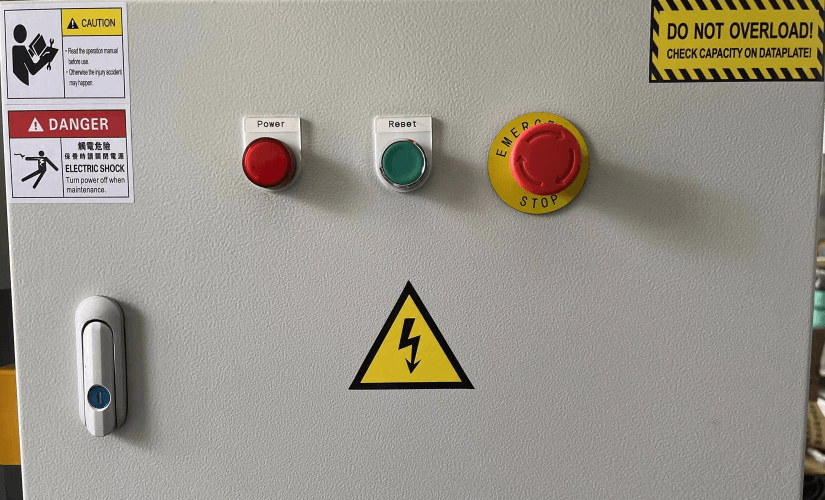
2. ຕູ້ໄຟຟ້າຫຼັກທີ່ມີສະວິດໄຟ, ໄຟພະລັງງານ, ປຸກ, ປັບຟັງຊັນໃຫມ່ແລະຟັງຊັນຢຸດສຸກເສີນ.
3.Foot pedal ເພື່ອຄວບຄຸມທິດທາງການຫມຸນ.



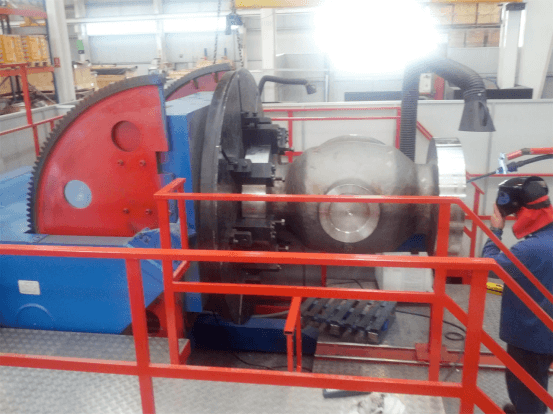
✧ ຄວາມຄືບຫນ້າການຜະລິດ
ຕໍາແຫນ່ງການເຊື່ອມໂລຫະທີ່ມີແສງສະຫວ່າງຂະຫນາດນ້ອຍແມ່ນສໍາລັບຊິ້ນວຽກຂະຫນາດນ້ອຍ, ຕໍາແຫນ່ງການເຊື່ອມໂລຫະ 100 ກິໂລທີ່ມີການຫມຸນມໍເຕີແລະການອຽງຄູ່ມື, ລະບົບການອຽງດ້ວຍລໍ້ມືຫນຶ່ງເພື່ອປັບສະກູ, ສະກູເພື່ອປັບເກຍ, ດັ່ງນັ້ນຜູ້ວາງຕໍາແຫນ່ງຈະຮັບຮູ້ມຸມອຽງ 0-90 ອົງສາ. ເຖິງແມ່ນວ່າການອຽງແມ່ນໂດຍລໍ້ຄູ່ມື, ແຕ່ດ້ວຍມື screw ແລະເກຍ, ມັນງ່າຍທີ່ຈະປັບມັນ.
Weldsuccess ຜະລິດຕໍາແຫນ່ງການເຊື່ອມໂລຫະຈາກການຊື້ແຜ່ນເຫຼັກຕົ້ນສະບັບແລະການຕັດ CNC. ດ້ວຍການອະນຸມັດ IS0 9001: 2015, ພວກເຮົາຄວບຄຸມຄຸນນະພາບໂດຍແຕ່ລະຄວາມຄືບຫນ້າການຜະລິດ.

✧ ໂຄງການທີ່ຜ່ານມາ